
OpenHarmony相机用户态驱动框架

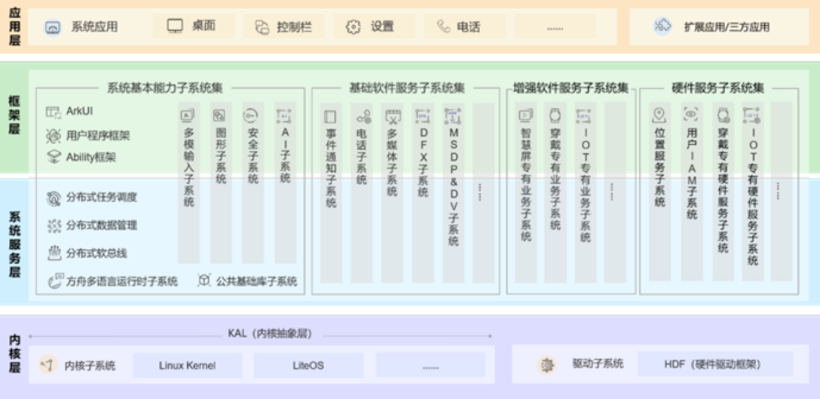
相机作为智能手机上少有的成长空间不错的,能够做出差异化的功能,每年都能成为各大Android手机厂商争相宣传的亮点。众所周知Android采用Linux 作为其内核,而Linux采用的开源协议具有传染性[1],导致Android HAL[2]成为了手机厂商们竞争的重要战场。随着OpenHarmony 3.1[3]的发布,相机模块也逐渐完善起来,目前提供了基础预览和拍照的能力。OpenHarmony中,相机用户态驱动框架承担了和Android Camera HAL一样的角色,这部分位于OpenHarmony的HDF[4]中,对上实现相机HDI[5]接口,对下实现相机Pipeline模型,管理相机各个硬件设备。
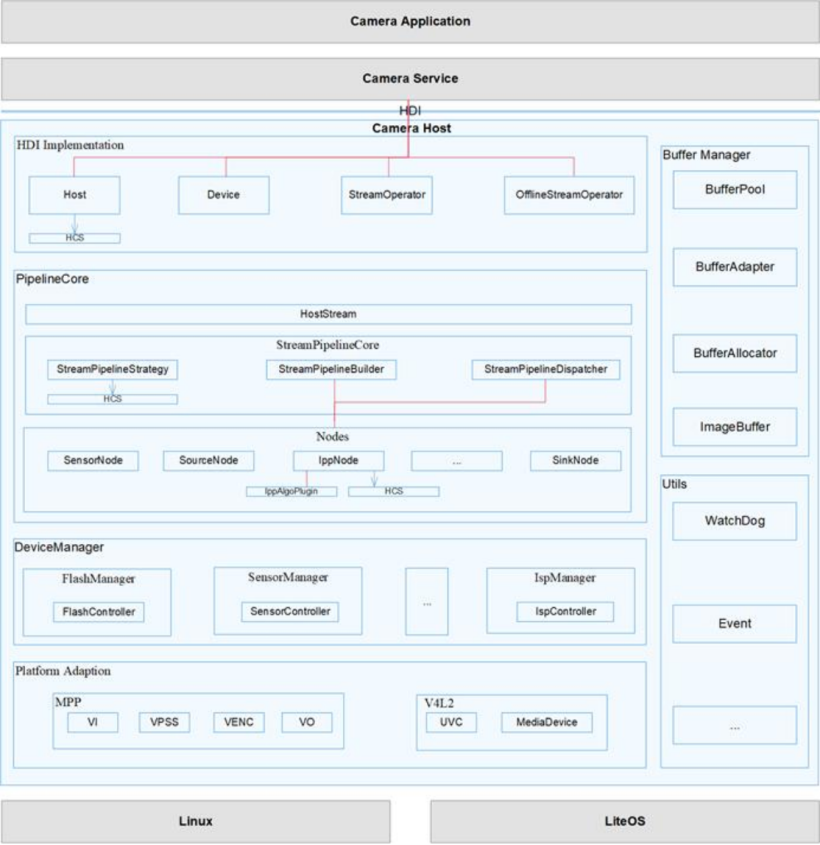
相机用户态驱动框架(下图的CameraHost 部分)总体可以分为三层,HDI实现层,实现相机标准南向接口;框架层,对接HDI实现层的控制、流的转发,实现数据通路的搭建、管理相机各个硬件设备等功能;适配层,屏蔽底层芯片和OS差异,支持多平台适配。
模块介绍
HDI Implementation:对上实现HDI接口,向下调用框架层的接口,完成HDI接口任务的转发。
Buffer Manager : 屏蔽不同内存管理的差异,为子系统提供统一的操作接口,同时提供buffer轮转的功能。
Pipeline Core :解析HCS配置完成pipeline的搭建,调度pipeline中的各个node完成流的处理。
Device Manager:通过调用底层硬件适配层接口,实现查询控制底层设备、枚举监听底层设备的功能。
Platform Adaption :屏蔽硬件差异,为Device Manager提供统一的操作底层硬件的能力。
目录结构
Shell
drivers/peripheral/camera
|-- README_zh.md
|-- bundle.json
|-- figures
| `-- logic-view-of-modules-related-to-this-repository_zh.png
|-- hal
| |-- BUILD.gn
| |-- adapter
| |-- buffer_manager
| |-- camera.gni
| |-- device_manager
| |-- hdi_impl
| |-- include
| |-- init
| |-- pipeline_core
| |-- test
| `-- utils
|-- hal_c
| |-- BUILD.gn
| |-- camera.gni
| |-- hdi_cif
| `-- include
`-- interfaces
|-- hdi_ipc
|-- hdi_passthrough
`-- include
HDI Implementation中的预览流程
接下来我们通过已经发布的OpenHarmony 3.1开源代码,来看看预览是怎么完成的吧。
drivers/peripheral/camera/hal/test/v4l2/src /preview_test.cpp存放了针对v4l2的预览测试代码,入口如下:
C++
TEST_F(UtestPreviewTest, camera_preview_0001)
{
std::cout << "==========[test log] Preview stream, expected success." << std::endl;
// Get the stream manager
display_->AchieveStreamOperator(); // 获取stream operator
// start stream
display_->intents = {Camera::PREVIEW}; // 预览流
display_->StartStream(display_->intents); // 起流
// Get preview
display_->StartCapture(display_->streamId_preview, display_->captureId_preview, false, true);
// release stream
display_->captureIds = {display_->captureId_preview};
display_->streamIds = {display_->streamId_preview};
display_->StopStream(display_->captureIds, display_->streamIds);
}
先获取stream operator实例
C++
void testdisplay::achievestreamoperator()
{
// create and get streamoperator information
std::shared_ptr<ohos::camera::istreamoperatorcallback> streamoperatorcallback =
std::make_shared<ohos::camera::istreamoperatorcallback>();
rc = cameradevice->getstreamoperator(streamoperatorcallback, streamoperator);
// ........
}
通过前文的streamOperator创建流
C++
void TestDisplay::StartStream(std::vector<OHOS::Camera::StreamIntent> intents)
{
// ..............................
for (auto& intent : intents) {
if (intent == 0) {
std::shared_ptr<IBufferProducer> producer = IBufferProducer::CreateBufferQueue();
producer->SetQueueSize(8); // 创建buffer的生产端,并和相应的流进行绑定
auto callback = [this](std::shared_ptr<SurfaceBuffer> Prebuffer) {
BufferCallback(Prebuffer, preview_mode);
return;
};
producer->SetCallback(callback);
streamInfo->streamId_ = streamId_preview;
streamInfo->width_ = 640; // 640:picture width
streamInfo->height_ = 480; // 480:picture height
streamInfo->format_ = CAMERA_FORMAT_YUYV_422_PKG;
streamInfo->datasapce_ = 8; // 8:picture datasapce
streamInfo->intent_ = intent;
streamInfo->tunneledMode_ = 5; // 5:tunnel mode
streamInfo->bufferQueue_ = producer;
streamInfos.push_back(streamInfo);
} else if (intent == 1) {
// .......................
}
rc = streamOperator->CreateStreams(streamInfos); // 创建流
// ................................
rc = streamOperator->CommitStreams(Camera::NORMAL, ability); // 提交流
// .................................
}
下面我们正式进入到hal的源代码中看看是怎么创建流的吧。
C++
CamRetCode StreamOperator::CreateStreams(const std::vector<std::shared_ptr<StreamInfo>>& streamInfos)
{
// .....
for (auto it : streamInfos) {
//....
std::shared_ptr<IStream> stream = StreamFactory::Instance().CreateShared(
IStream::g_availableStreamType[it->intent_], it->streamId_, it->intent_, pipelineCore_, messenger_); // 创建流实例
// ...
StreamConfiguration scg;
scg.id = it->streamId_;
scg.type = it->intent_;
scg.width = it->width_;
scg.height = it->height_;
PixelFormat pf = static_cast<PixelFormat>(it->format_);
scg.format = BufferAdapter::PixelFormatToCameraFormat(pf);
scg.dataspace = it->datasapce_;
scg.tunnelMode = it->tunneledMode_;
scg.minFrameDuration = it->minFrameDuration_;
scg.encodeType = it->encodeType_;
RetCode rc = stream->ConfigStream(scg); // 依据上文的流信息配置流
// ...
if (it->bufferQueue_ != nullptr) { // 绑定前文的生产端
auto tunnel = std::make_shared<StreamTunnel>();
CHECK_IF_PTR_NULL_RETURN_VALUE(tunnel, INSUFFICIENT_RESOURCES);
RetCode rc = tunnel->AttachBufferQueue(it->bufferQueue_);
CHECK_IF_NOT_EQUAL_RETURN_VALUE(rc, RC_OK, INVALID_ARGUMENT);
if (stream->AttachStreamTunnel(tunnel) != RC_OK) {
CAMERA_LOGE("attach buffer queue to stream [id = %{public}d] failed", it->streamId_);
return INVALID_ARGUMENT;
}
}
{
std::lock_guard<std::mutex> l(streamLock_);
streamMap_[stream->GetStreamId()] = stream; // 保存流实例
}
// ...
}
从上面可以看出,消费端传递到了hal,那必然是由hal从bufferproducer获取buffer,并触发预览的启动流程。那看看AttachStreamTunnel 的实现吧。
C++
RetCode StreamBase::AttachStreamTunnel(std::shared_ptr<StreamTunnel>& tunnel)
{
if (state_ == STREAM_STATE_BUSY || state_ == STREAM_STATE_OFFLINE) {
return RC_ERROR;
}
tunnel_ = tunnel; // 绑定生产端
CHECK_IF_PTR_NULL_RETURN_VALUE(tunnel_, RC_ERROR);
tunnel_->SetBufferCount(GetBufferCount()); // 配置轮转的buffer个数
TunnelConfig config = {(uint32_t)streamConfig_.width, (uint32_t)streamConfig_.height,
(uint32_t)streamConfig_.format, streamConfig_.usage};
tunnel_->Config(config);
streamConfig_.tunnelMode = true;
return RC_OK;
}
CreateStream之后便是CommitStream,这里的CommitStream 做了些什么事情呢,我们接着往下看。
C++
CamRetCode StreamOperator::CommitStreams(OperationMode mode,
const std::shared_ptr<CameraStandard::CameraMetadata>& modeSetting)
{
// ......
std::vector<StreamConfiguration> configs = {};
{
std::lock_guard<std::mutex> l(streamLock_);
for (auto it : streamMap_) { // 获取流的配置,前文CreateStrea时保存的流
configs.emplace_back(it.second->GetStreamAttribute());
}
}
// 检查流是否被支持
DynamicStreamSwitchMode method = streamPipeline_->CheckStreamsSupported(mode, modeSetting, configs);
if (method == DYNAMIC_STREAM_SWITCH_NOT_SUPPORT) {
return INVALID_ARGUMENT;
}
if (method == DYNAMIC_STREAM_SWITCH_NEED_INNER_RESTART) {
std::lock_guard<std::mutex> l(streamLock_);
for (auto it : streamMap_) {
it.second->StopStream();// 如果流被支持,但需要内部重启,这里先停流
}
}
{
std::lock_guard<std::mutex> l(streamLock_);
for (auto it : streamMap_) {
if (it.second->CommitStream() != RC_OK) { // 真正的 CommitStream,下面再细说
CAMERA_LOGE("commit stream [id = %{public}d] failed.", it.first);
return DEVICE_ERROR;
}
}
}
RetCode rc = streamPipeline_->PreConfig(modeSetting); // 把模式传入进行预配置
if (rc != RC_OK) {
CAMERA_LOGE("prepare mode settings failed");
return DEVICE_ERROR;
}
rc = streamPipeline_->CreatePipeline(mode);// 创建pipeline
if (rc != RC_OK) {
CAMERA_LOGE("create pipeline failed.");
return INVALID_ARGUMENT;
}
DFX_LOCAL_HITRACE_END;
return NO_ERROR;
}
C++
RetCode StreamBase::CommitStream()
{
// ...
hostStreamMgr_ = pipelineCore_->GetHostStreamMgr(); //从pipelinecore获取hoststreamanager
CHECK_IF_PTR_NULL_RETURN_VALUE(hostStreamMgr_, RC_ERROR);
// ...
info.bufferPoolId_ = poolId_;
info.bufferCount_ = GetBufferCount();
// 初始化 bufferpool
RetCode rc = bufferPool_->Init(streamConfig_.width, streamConfig_.height, streamConfig_.usage,
streamConfig_.format, GetBufferCount(), CAMERA_BUFFER_SOURCE_TYPE_EXTERNAL);
if (rc != RC_OK) {
CAMERA_LOGE("stream [id:%{public}d] initialize buffer pool failed.", streamId_);
return RC_ERROR;
}
}
// stream传递到pipelinecore 并进行绑定
RetCode rc = hostStreamMgr_->CreateHostStream(info, [this](std::shared_ptr<IBuffer> buffer) {
HandleResult(buffer);
return;
});
// ....
return RC_OK;
}
CreateStream 和CommitStream结束之后便是Capture,这里包含了起流的动作,关键实现如下:
C++
CamRetCode StreamOperator::Capture(int captureId, const std::shared_ptr<CaptureInfo>& captureInfo, bool isStreaming)
{
// ...
// captureId 捕获请求的id; captureInfo 预览/拍照/录像的参数;isStreaming 连续捕获还是单次捕获(拍照)
CaptureSetting setting = captureInfo->captureSetting_;
auto request =
std::make_shared<CaptureRequest>(captureId, captureInfo->streamIds_.size(), setting,
captureInfo->enableShutterCallback_, isStreaming);
for (auto id : captureInfo->streamIds_) {
// 创建捕获请求,并传递给前文创建的流
RetCode rc = streamMap_[id]->AddRequest(request);
if (rc != RC_OK) {
return DEVICE_ERROR;
}
}
// ...
}
从上面的代码可知预览、拍照、录像都是通过捕获请求触发,单次拍照则为单次捕获请求,预览和录像则是连续捕获请求。
C++
RetCode StreamBase::AddRequest(std::shared_ptr<CaptureRequest>& request)
{
CHECK_IF_PTR_NULL_RETURN_VALUE(request, RC_ERROR);
request->AddOwner(shared_from_this());
request->SetFirstRequest(false);
if (isFirstRequest) {
RetCode rc = StartStream(); // 起流
if (rc != RC_OK) {
CAMERA_LOGE("start stream [id:%{public}d] failed", streamId_);
return RC_ERROR;
}
request->SetFirstRequest(true);
isFirstRequest = false;
}
{
std::unique_lock<std::mutex> l(wtLock_);
waitingList_.emplace_back(request); // 捕获请求添加到waitingList
cv_.notify_one();
}
return RC_OK;
}
看看StreamStream是怎么实现的吧。
C++
RetCode StreamBase::StartStream()
{
// ...
RetCode rc = pipeline_->Prepare({streamId_}); // pipeline先完成一些准备工作
// ...
state_ = STREAM_STATE_BUSY;
std::string threadName =
g_availableStreamType[static_cast<StreamIntent>(streamType_)] + "#" + std::to_string(streamId_);
handler_ = std::make_unique<std::thread>([this, &threadName] {// 创建轮转线程
prctl(PR_SET_NAME, threadName.c_str());
while (state_ == STREAM_STATE_BUSY) {
HandleRequest(); // 处理捕获请求
}
});
// ...
rc = pipeline_->Start({streamId_}); // 通知pipeline和底层硬件可以开始出帧了
// ...
return RC_OK;
}
C++
void StreamBase::HandleRequest()
{
// 如果有 捕获请求下发,则退出等待状态
if (waitingList_.empty()) {
std::unique_lock<std::mutex> l(wtLock_);
if (waitingList_.empty()) {
cv_.wait(l, [this] { return !(state_ == STREAM_STATE_BUSY && waitingList_.empty()); });
}
}
// ...
request = waitingList_.front();
CHECK_IF_PTR_NULL_RETURN_VOID(request);
if (!request->IsContinous()) { // 如果是连续捕获,则保留一份拷贝在waitinglist
waitingList_.pop_front();
}
}
// 处理捕获请求
request->Process(streamId_);// 最终调用下面的Capture接口
return;
}
C++
RetCode StreamBase::Capture(const std::shared_ptr<CaptureRequest>& request)
{
CHECK_IF_PTR_NULL_RETURN_VALUE(request, RC_ERROR);
CHECK_IF_PTR_NULL_RETURN_VALUE(pipeline_, RC_ERROR);
RetCode rc = RC_ERROR;
if (request->IsFirstOne() && !request->IsContinous()) {
uint32_t n = GetBufferCount();
for (uint32_t i = 0; i < n; i++) {
DeliverBuffer();// 单次捕获一次性下发所有的buffer
}
} else {
do {
rc = DeliverBuffer();// 连续捕获每次下发一个buffer
} while (rc != RC_OK && state_ == STREAM_STATE_BUSY);
}
if (request->NeedCancel()) {// 被取消的捕获则退出
CAMERA_LOGE("StreamBase::Capture stream [id:%{public}d] request->NeedCancel", streamId_);
return RC_OK;
}
rc = pipeline_->Config({streamId_}, request->GetCaptureSetting());// 通知pipeline配置
if (rc != RC_OK) {
CAMERA_LOGE("stream [id:%{public}d] config pipeline failed.", streamId_);
return RC_ERROR
}
rc = pipeline_->Capture({streamId_}, request->GetCaptureId());// 这里的capture指的是pipeline中的source node开始回buffer
{
std::unique_lock<std::mutex> l(tsLock_);
inTransitList_.emplace_back(request);// 处理过的捕获请求存放在inTransitList
}
return RC_OK;
}
到这起流的流程就结束了,pipeline回上来的帧通过OnFrame接口处理。
C++
RetCode StreamBase::OnFrame(const std::shared_ptr<CaptureRequest>& request)
{
// ...
bool isEnded = false;
if (!request->IsContinous()) {
isEnded = true;
} else if (request->NeedCancel()) {
isEnded = true;
}
{
// inTransitList_ may has multiple copies of continious-capture request, we just need erase one of them.
std::unique_lock<std::mutex> l(tsLock_);
for (auto it = inTransitList_.begin(); it != inTransitList_.end(); it++) {
if ((*it) == request) {
inTransitList_.erase(it);// 已经回帧的请求,从inTransitList删除
break;
}
}
if (isEnded) {
// if this is the last request of capture, send CaptureEndedMessage.
auto it = std::find(inTransitList_.begin(), inTransitList_.end(), request);
if (it == inTransitList_.end()) {
std::shared_ptr<ICaptureMessage> endMessage =
std::make_shared<CaptureEndedMessage>(streamId_, request->GetCaptureId(), request->GetEndTime(),
request->GetOwnerCount(), tunnel_->GetFrameCount());
CAMERA_LOGV("end of stream [%d], ready to send end message, capture id = %d",
streamId_, request->GetCaptureId());
messenger_->SendMessage(endMessage);
pipeline_->CancelCapture({streamId_});// 如果此次捕获结束,则取消捕获
}
}
}
ReceiveBuffer(buffer);// 底层返回的buffer送还到生产端,最终帧数据送到消费端
return RC_OK;
}
附录
- linux和Android的关系 – 知乎 (zhihu.com) ↩︎。
- HAL Subsystem | Android Open Source Project (google.cn) ↩︎。
- zh-cn/release-notes/OpenHarmony-v3.1-release.md · OpenHarmony/docs – Gitee.com ↩︎。
- OpenHarmony HDF 驱动框架介绍和驱动加载过程分析-OpenHarmony技术社区-51CTO.COM ↩︎。
- OpenHarmony HDF HDI基础能力分析与使用-51CTO.COM 。

© 版权声明
文章版权归作者所有,未经允许请勿转载。


