
IT之家5月16日消息,北京航空航天大学最近发布了闫晓军教授团队在机器昆虫方面的最新研究成果。据北京航空航天大学官网的报道,闫晓军教授团队从头开始发明了一种微型动力系统,专门用于昆虫尺寸的机器人。基于这一技术,他们成功研发了一种名为BHMbot(身长2厘米,重1.76克,包含能源、控制、通讯和传感模块)的微型机器昆虫,具有快速机动、高载重和无线可控的特点。相关研究成果以《NatureCommunications》杂志上发表的《AWirelessControlledRoboticInsectwithUltrafastUntetheredRunningSpeeds》为题进行了在线发布。BHMbot机器昆虫解决了微型机器人领域的三大难题,其中包括:

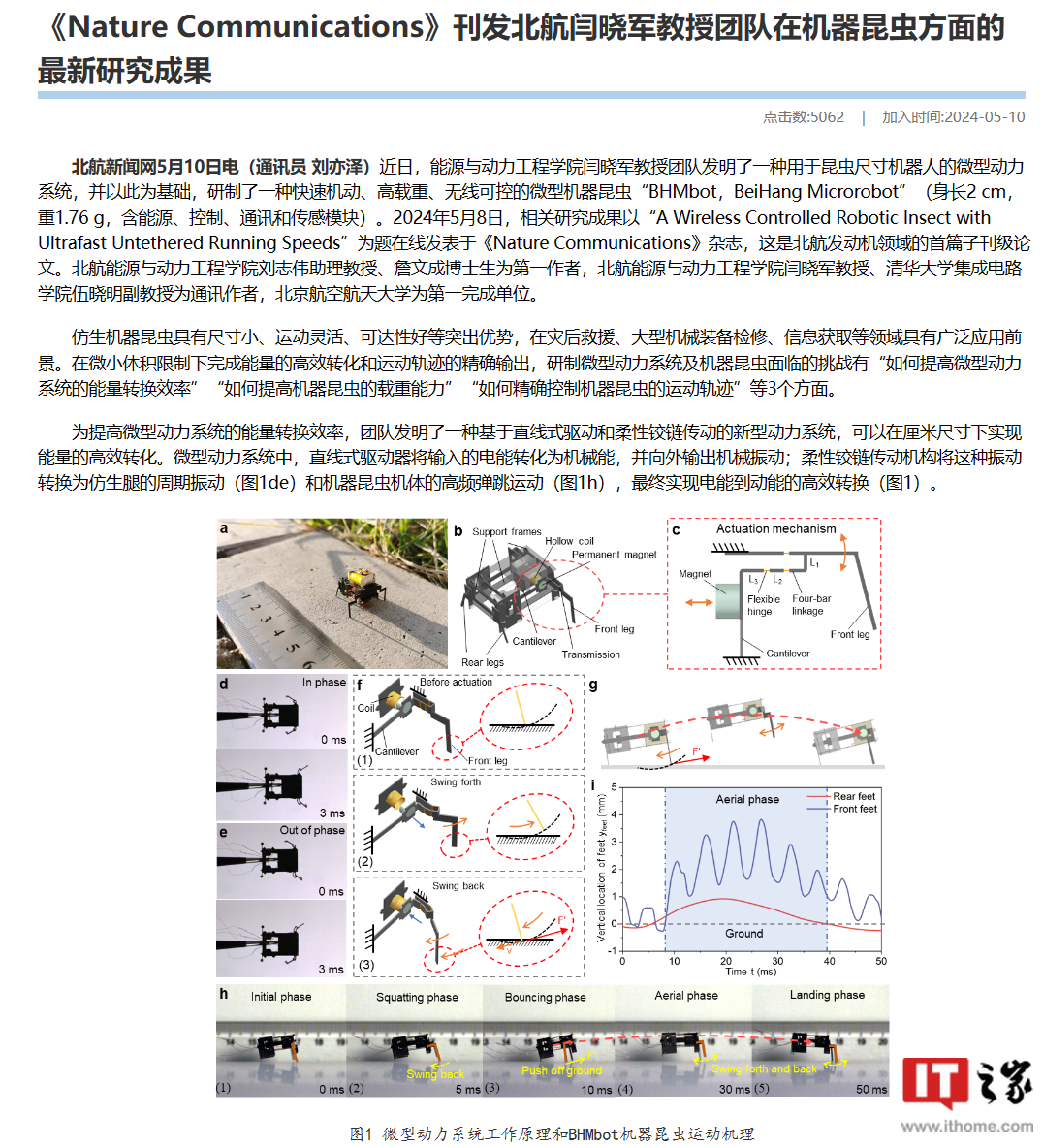
1. 微型动力系统的能量转换效率提高:新型动力系统采用直线式驱动器将输入的电能转化为机械能,进而输出机械振动;柔性铰链传动机构将这种振动转换为仿生腿的周期振动和机器昆虫机体的高频弹跳运动,最终实现电能到动能的高效转换。这一技术的创新实现了在厘米尺寸下能量的高效转化。
2. 机器昆虫的载重能力提高:团队设计并实现了一种仿生奔跑步态,使BHMbot机器昆虫能够通过自适应调节步频和步幅,在高载重下实现快速爬行。BHMbot还可以通过增加跳跃频率来抵消单次跳跃步幅衰减,甚至在承载5.5倍自身质量的情况下,仍能保持快速运动。当载重低于一定临界值时,BHMbot的运动速度甚至随着载重增加而上升。
3. 机器昆虫运动轨迹的精确控制:团队解决了机器控制问题,研发了厘米级的微型控制和通讯电路,使BHMbot能够实现程序控制和遥控控制。通过预设程序,BHMbot可以实现不同形状的运动轨迹,如圆形、矩形和“BUAA”字样;同时,操作人员可以通过电脑或手机端发送实时控制指令,实现无线遥控,让BHMbot在运动时避碍物。
这项研究的突破性在于,闫晓军教授团队成功地创造了一种功能强大的微型机器昆虫,解决了传统微型机器人面临的多个难题,为机器人技术领域的发展带来了新的可能性。
什么是生物光学
生物光学是在生物、光学、机械、精密计量等多学科的基础上产生一个交叉学科。
目前这方面的研究越来越多,美国光学学会OSA、SPIE等多个光学学会每年都举行多次这方面的国际会议。
随着这方面的研究不断增加,1996年SPIE新创刊了“Journal of Biomedical Optics”杂志,着重发表生物光学方面的最新研究成果。
我国对这方面的研究也更加重视,自然科学基金近年来增加了对交叉学科(生命与信息,生命与机械)的资助强度。
生物光学是一个很广泛的学科名词,主要包括生物与光学有机结合产生的新概念、新思想和光学在生物界的新应用。
各种各样的生物传感器的诞生就是很好的说明。
这里将介绍这一交叉学科的另一个产物:昆虫仿生研究。
仿生学的研究历史已有几十年,它属于生物科学与工程科学的交叉科学,通过研究生物机构、机理,完善和创造工程科学的概念和原理,从而创造出有突破性的产品。
人们仿照鸟的飞行研制飞机是众所周知的。
随着目前微机械制造水平的提高,制造出小巧、有创新功能的微机械产品是人们所希望的。
在设计、制作微机械过程中,人们发现总体尺寸缩小后,如果仍用传统的理论概念,相应缩小每个零件的尺寸,即便作了力学仿真和克服了巨大的工艺困难也难以成功。
按照传统的空气动力学理论,蜻蜓不能飞,因为它没有象飞机那样流线型的翅膀,无法有效利用空气的升力。
研究昆虫运动机理,为微机械设计寻找新理论,是昆虫仿生研究的一个热点。
当然昆虫飞行机理的研究只是昆虫仿生研究的一部分,昆虫的传感器,昆虫的群体协调性,昆虫的神经网络等等都有许多值得研究的地方,他们都将给微机械的研制带来不少新的启示。
我们将在第二部分结合目前国际上昆虫仿生研究的热点课题进行进一步说明。
正如仿生学是多学科的交叉产物一样,昆虫仿生研究也必将涉及到多个学科,如生物、计量、机械、信息科学、控制理论、力学等等。
从学科发展的角度讲,昆虫仿生研究不仅是多学科的有机结合,它也促进个各学科的发展。
例如:昆虫飞行机理的研究将使目前的空气动力学理论更加完善;昆虫仿生研究中遇到的各种测量问题,将促进计量研究向新领域的拓宽。
从目前国际上昆虫仿生研究队伍组成看,学科交叉的优势十分明显。
日本东京大学的河内启二教授的研究队伍,以流体力学的研究专业为主,吸收了包括计量、生物、机械、信息科学等多学科的研究人员。
研究包括精密测量昆虫运动翅膀变形,测量昆虫脑神经电流和呼吸,研究昆虫群的协调等,并在此基础上研究昆虫运动机理。
日本东京大学的下山勋教授的研究队伍,以微机械研究专业为主,吸收了包括计量、生物、力学,光学等学科的研究人员,仿造昆虫的翅膀机构制造微机械,仿昆虫复眼制造机器人传感器。
美国Teaxs大学的Dudley教授的研究队伍以动物学专业为主,吸收了生物、计量、信息科学等多学科,研究多种昆虫飞行原理和其各自的能量消耗情况,为微型飞行器服务。
由此看出,无论昆虫仿生研究从那方面入手,多学科的交叉是必不可少的。
应该指出,昆虫仿生研究不但会给微机械、力学等领域带来新观点、新概念,同时这一研究本身也促进了计量科学的发展。
昆虫仿生研究要建立在大量精密测量数据的基础上,目前的精密测量方法用于测量象昆虫这样小的运动物体,还存在一定的问题,如动态范围、分辨率等,这些问题的解决本身推进了计量科学的发展。
另一方面,微电子、微光学等领域新技术、新元件的诞生,也促进了昆虫仿生研究的发展。
通过仿生学发明的科学家有哪些
1、将海豚的体形或皮肤结构(游泳时能使身体表面不产生紊流)应用到潜艇设计原理上。
2、 苍蝇,是细菌的传播者,谁都讨厌它。
可是苍蝇的楫翅(又叫平衡棒)是“天然导航仪”,人们模仿它制成了“振动陀螺仪”。
这种仪器目前已经应用在火箭和高速飞机上,实现了自动驾驶。
3、苍蝇的眼睛是一种“复眼”,由3000多只小眼组成,人们模仿它制成了“蝇眼透镜”。
“蝇眼透镜”是用几百或者几千块小透镜整齐排列组合而成的,用它作镜头可以制成“蝇眼照相机”,一次就能照出千百张相同的相片。
这种照相机已经用于印刷制版和大量复制电子计算机的微小电路,大大提高了工效和质量。
“蝇眼透镜”是一种新型光学元件,它的用途很多。
4、据《韩非子》记载鲁班用竹木作鸟“成而飞之,三日不下”。
然而人们更希望仿制鸟儿的双翅使自己也飞翔在空中。
早在四百多年前,意大利人利奥那多·达·芬奇和他的助手对鸟类进行仔细的解剖,研究鸟的身体结构并认真观察鸟类的飞行。
设计和制造了一架扑翼机,这是世界上第一架人造飞行器。
5、意大利人斯帕兰赞尼很早以前就发现蝙蝠能在完全黑暗中任意飞行,既能躲避障碍物也能捕食在飞行中的昆虫,但是堵塞蝙蝠的双耳后,它们在黑暗中就寸步难行了。
面对这些事实,帕兰赞尼提出了一个使人们难以接受的结论:蝙蝠能用耳朵“看东西”。
第一次世界大战结束后,1920年哈台认为蝙蝠发出声音信号的频率超出人耳的听觉范围。
并提出蝙蝠对目标的定位方法与第一次世界大战时郎之万发明的用超声波回波定位的方法相同。
遗憾的是,哈台的提示并未引起人们的重视,而工程师们对于蝙蝠具有“回声定位”的技术是难以相信的。
直到1983年采用了电子测量器,才完完全全证实蝙蝠就是以发出超声波来定位的。
但是这对于早期雷达和声纳的发明已经不能有所帮助了。
6、早在40年代,人们根据对萤火虫的研究,创造了日光灯,使人类的照明光源发生了很大变化。
近年来,科学家先是从萤火虫的发光器中分离出了纯荧光素,后来又分离出了荧光酶,接着,又用化学方法人工合成了荧光素。
由荧光素、荧光酶、ATP(三磷酸腺苷)和水混合而成的生物光源,可在充满爆炸性瓦斯的矿井中当闪光灯。
由于这种光没有电源,不会产生磁场,因而可以在生物光源的照明下,做清除磁性水雷等工作。
7、19世纪初,意大利物理学家伏特,以电鱼发电器官为模型,设计出世界上最早的伏打电池。
因为这种电池是根据电鱼的天然发电器设计的,所以把它叫做“人造电器官”。
对电鱼的研究,还给人们这样的启示:如果能成功地模仿电鱼的发电器官,那么,船舶和潜水艇等的动力问题便能得到很好的解决。
8、仿生学家仿照水母耳朵的结构和功能,设计了水母耳风暴预测仪,相当精确地模拟了水母感受次声波的器官。
把这种仪器安装在舰船的前甲板上,当接受到风暴的次声波时,可令旋转360°的喇叭自行停止旋转,它所指的方向,就是风暴前进的方向;指示器上的读数即可告知风暴的强度。
这种预测仪能提前15小时对风暴作出预报,对航海和渔业的安全都有重要意义。
9、斑马 斑马生活在非洲大陆,外形与一般的马没有什么两样,它们身上的条纹是为适应生存环境而衍化出来的保护色。
在所有斑马中,细斑马长得最大最美。
它的肩高140-160厘米,耳朵又圆又大,条纹细密且多。
斑马常与草原上的牛羚、旋角大羚羊、瞪羚及鸵鸟等共外,以抵御天敌。
人类将斑马条纹应用到到军事上是一个是很成功仿生学例子。
人类从大自然得到的启示有哪些?
学霸牛博士
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...