大数据文摘出品
几个月前,当小米宣布推出“铁大”CyberOne人形机器人时,人们并不完全清楚小米究竟打算让这款机器人做些什么。
大家的猜测是,小米现在不会说“铁大”将有某种实际用途,而是将其作为一种探索可能性的方式,探索可以迁移到其它地方的实际应用技术。
令人惊喜的是,小米的机器人专家已经开始教会机器人做一些即使不是十分有用,至少也很吸引眼球的事情——比如打架子鼓。
从走路都会摔倒到自己学会打架子鼓
演奏的谱子其实是给“铁大”输入是一个MIDI文件,铁大能够将其解析为可以打出来的节拍。
然后,它会产生一连串与音乐同步的全身协调运动轨迹,让末端的肢体必须确保鼓点准确地随着节拍移动。
“铁大”在这方面做得相当不错。也许这可能不是超前沿的人形机器人研究,但是看看像小米这样的公司在这方面的探索还是很有趣的。
这个项目的技术难点在于,当接收到长序列的鼓点时,“铁大”需要为每个手臂和腿分配序列,并在硬件约束下生成连续的无碰撞全身轨迹。因此,研究人员需要提取基本节拍,并通过优化离线建立鼓点运动轨迹库。然后,“铁大”可以产生连续的轨迹符合任何鼓乐谱。
这种方法为 “铁大”打鼓提供了更多的自由,演奏的水平只受到机器人技术能力的限制。
相比几个月前,走路都会摔倒的“铁大”,明显在末端控制方面已经有了长足的进步。

“铁大”的最新进展,为何要通过打鼓来演示?
小米机器人实验室的高级硬件工程师就这一项目也接受了媒体采访。
首先他谈到了为什么小米会研发“铁大”机器人,这包含三个原因:
- 第一个原因是,小米看到中国乃至全世界的劳动力大幅下降。尽管还有很长的路要走,但我们正在努力用类人机器人取代人类劳动力。
- 第二个原因是,小米认为人形机器人是所有机器人形态中技术上最具挑战性的。通过对仿人机器人的研究,小米也可以使用这项技术来解决其他机器人形式的问题,如四足机器人,机械臂,甚至轮式机器人。
- 第三个原因是,小米希望成为中国技术最先进的公司,而人形机器人技术很性感。
至于之所以在这个过程中,会选择打鼓来展示他们的研究,该工程师表示,在小米“铁大”CyberOne于8月11日正式发布之后,我们从没有机器人背景的公众那里得到了很多反馈。他们更感兴趣的是看到人形机器人做人类不能轻易做到的事情。
老实说,很难找到这样的场景,因为大家都知道知道第一个原型机肯定会远远落后于人类。但是有一天,团队中一位刚开始学习打鼓的工程师建议说,打鼓可能是一个例外。她认为,与新手鼓手相比,人形机器人在手足协调运动和节奏控制方面更有优势。听闻此言,团队成员都觉得这是个好主意,而且打鼓本身也很酷很有趣,所以团队决定选择打鼓来展示铁大的最新进展。
该工程师还透露,目前他们正在研发第二代“铁大”CyberOne,希望进一步提高它的运动和操作能力。在硬件层面,也计划增加更多的自由度,集成自主开发的灵巧手,并添加更多的传感器。在软件层面则会开发更加健壮的运动和视觉控制算法。
“铁大”的诞生
8月11日,小米秋季新品发布会在京举行,除了小米MIX Fold 2、Redmi K50至尊版等重磅产品首发,小米首款全尺寸人形仿生机器人CyberOne也正式亮相。
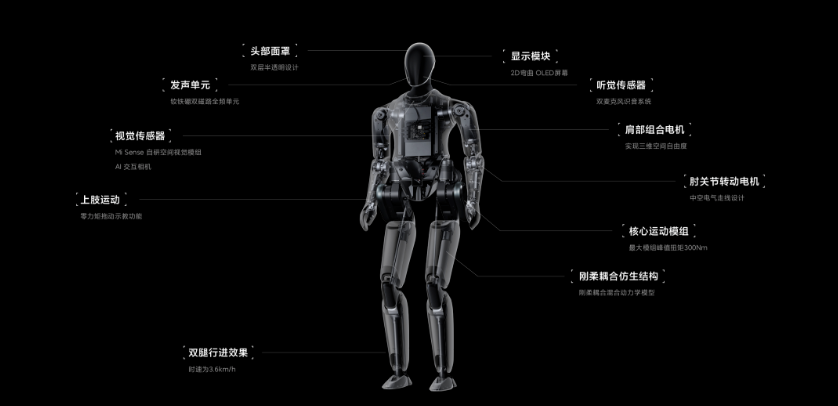
CyberOne是继去年小米仿生四足机器人Cyberdog后,小米机器人Cyber家族的新成员,内部艺名“铁大”,它具有高情商、可感知人类情绪,视觉敏锐、可对真实世界三维虚拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先技术能力。
“CyberOne背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,背后有无数的软件、硬件、算法的开发工作,投入巨大。”小米集团创始人、董事长兼CEO雷军表示,CyberOne以人工智能为内核,以标准人形为载体,是小米对未来科技生态的一次探索,也是小米多元融合技术体系的新成果。
CyberOne身高177CM、体重52KG,是一款真正意义上的全尺寸人形仿生机器人。相比于仿生四足机器人而言,人形机器人机械复杂度更高,需要性能更强大的电机、更多的机身自由度、复杂的人形双足控制算法。此次CyberOne支持多大21个自由度,并能实现各自由度0.5ms级别的实时响应,可充分模拟人的各项动作。
相关报道:
https://spectrum.ieee.org/humanoid-robot-xiaomi-cyberone
https://spectrum.ieee.org/xiaomi-robot-drummer
https://mp.weixin.qq.com/s/V5AjnZEBPL5oTBleLsgZ_w
© 版权声明
文章版权归作者所有,未经允许请勿转载。